車載ネットワークにおけるイーサネット

初めに
本ブログではイーサネット、TCP/IPに関する話題を取り上げることがあります。
自身の学習として今後の業務に役立てやすいというのが主な理由となります。
そこで、そもそも私の業務である車載ECUのソフトウェア開発とイーサネットの関係について簡単に説明します。
CAN(Controller Area Network)とは
いきなりイーサネットとは別の通信規格となってしまいますが、まずは車の通信を語るうえで欠かすことのできないCANについて説明します。
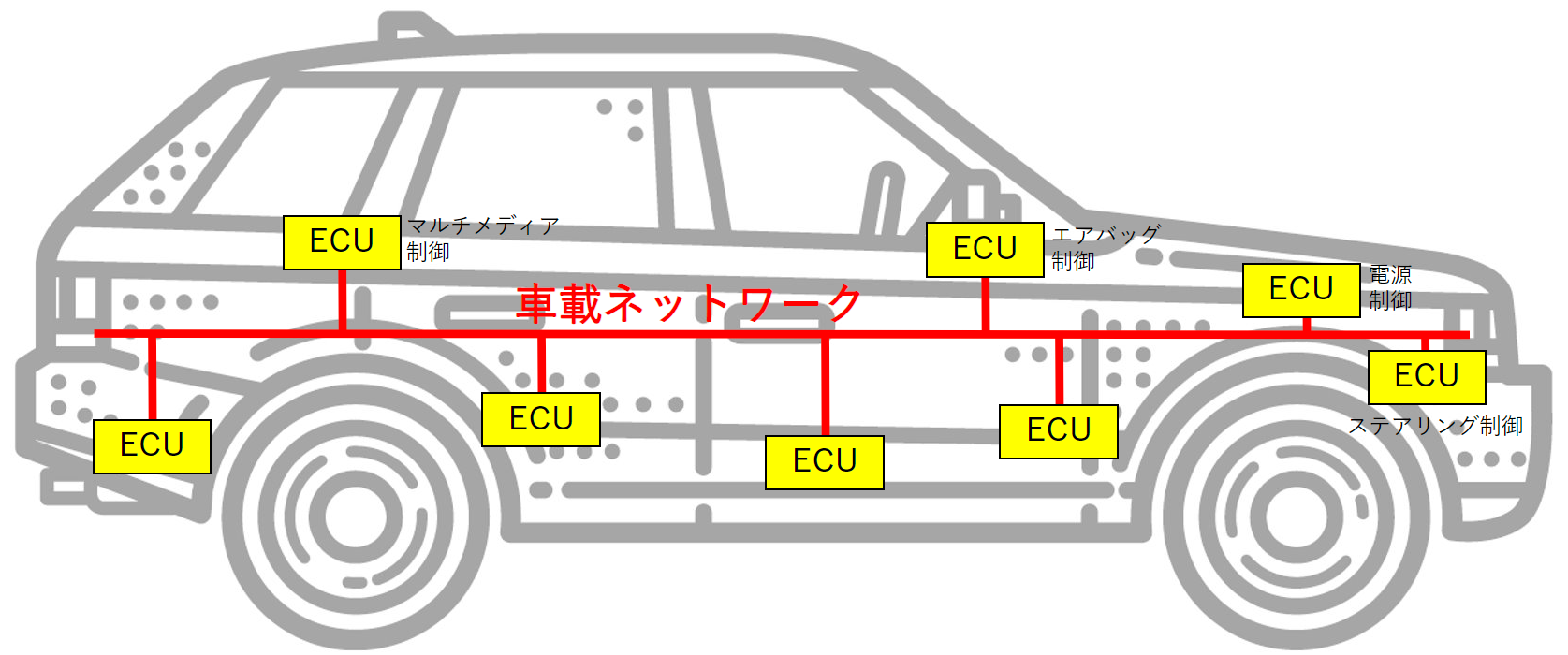
CAN(Controller Area Network)とは、車載ネットワークで標準的に使用されている通信規格です。
ここでいう車載ネットワークとは、車の中に存在する多数のECU(Electronic Control Unit)で形成される通信網のことです。
ECUは車両内の各種制御装置(エンジン、ステアリング、エアバッグ、電源など)のことで、多いクルマでは100個超のECUが搭載され常時通信と車両の制御を行っています。
CANは1983年頃にボッシュ社で開発が開始され、1991年にベンツSクラスがCANを適用した最初の量産車として販売されました。
その後、車載ネットワークにおけるCAN通信は標準化の動きとなり、1994年に国際標準化機構(ISO)により標準規格(ISO11898/ISO11519)となりました。
以降車の通信と言ったらCANと言われるほど、CAN通信と車は切っても切れない仲となっており今日まで続いています。
CANには以下のような特徴があります。
- ネットワークトポロジー(配線の構造)にバス型を採用
→ シンプルなネットワーク構成、無駄な配線を減らせる(軽量化) - 2線式差動電圧方式
→ 耐ノイズ性 - マルチマスタ方式
→ 自由度の高いネットワーク構成が可能 - CSMA/CA
→ データ衝突検知、各データに優先度付けを行い転送 - エラー検出メカニズム
CAN通信についてより詳細を知りたい方は以下などを参考にしてみてください。
なぜ車にイーサネットなのか
ここまででCANという車載ネットワークに適した通信規格の生い立ちと、その特徴をざっくりと説明しました。ではなぜ今イーサネットが車に必要となっているのか。その理由は近年の車の高機能化が深くかかわってきます。
もともとCANでやりとりされるデータは、比較的小さいものを想定して規格が作られました。
そのため一度に送信できるデータ量は8バイト、最大通信速度は1Mbpsとなっています。
2012年にはデータ長を従来の8バイトから64バイトに拡張し、最大通信速度が5MbpsとなるCANFDも発表され車載ネットワークに組み込まれましたが、それでもイーサネットの通信速度には及びません。
ここで重要となってくるのは車が扱う情報量の増加です。
例えば近年話題となっている自動運転の実用化ですが、その実現には車に取り付けられる数多くのセンサーから送り出されるデータ量に対応するため、数Gbpsもの通信速度が必要になるといわれています。
また、Over The Air(OTA)技術による車載ECUのファームウェアアップデート、SOCセンタとの連携によるインシデント対応、SDNによる車載ネットワークの管理など、これまでにない多くの情報を車が取り扱うケースが増えてきています。
最後に
以上から車載ネットワークにおけるイーサネット通信の重要性をざっくりとでも理解いただけると幸いです。
また、CANとイーサネットにはそれぞれメリットデメリットがあり、現在の車載ネットワークではCAN通信とイーサネット通信を適材適所で使い分けていくことが重要になっています。